
検査/画像処理
2017.01.19
宇都宮大学 尾崎研究室 様 イチゴ収穫ロボット
第7回ロボット大賞(文部科学大臣賞)を受賞したイチゴ収穫ロボットの「目」として当社のReal True Color XYZカメラ「RTC-21」が、完熟イチゴの識別と非接触によるイチゴの収穫に貢献
宇都宮大学工学部の尾崎教授が主催する研究室(計測・ロボット工学研究室)で研究が進められている「イチゴ収穫ロボット」の「目」として、池上通信機のReal True Color XYZカメラ「RTC-21」を採用。イチゴ収穫時の茎・葉の認識性能の向上に加え、「RTC-21」の特長である高色域・高色忠実を活かしてイチゴの色づきをより高精度に識別することで、完熟イチゴの非接触による収穫に貢献しています。

イチゴ収穫ロボットの概要
これまでイチゴは流通時の損傷を受けやすいという理由から完熟状態での遠隔地への出荷が困難な果物でした。それを可能にしたのが「イチゴ収穫ロボット」です。
イチゴ収穫ロボットは完熟状態のイチゴを池上通信機のRTC-21カメラで選別し、イチゴの茎をつまんで収穫します。そして収穫したイチゴは人の手に触れないまま専用の容器「フレシェル(Freshell)R」に入れられて輸送されるのです。この間一度も人の手を介さないところに特長があります。
このイチゴ収穫ロボットが栃木県の新しいイチゴの品種として注目されている大型完熟イチゴの収穫で活躍。RTC-21で選別された完熟した大型完熟イチゴは、人の手に一切触れることなく「フレシェル」に個別包装され、これまで産地でしか流通できなかった大型完熟イチゴの遠方への流通を可能としたのです。
この成果として、「フレシェル」に個別包装された完熟の大型完熟イチゴが鮮度を保ったままヨーロッパに空輸され、2年連続で国際味覚審査機構の優秀味覚賞(2015年度は二ツ星、2016年度は三ツ星)を受賞しました。

フレシェル

大型完熟イチゴの大きさ比較
これまでイチゴは流通時の損傷を受けやすいという理由から完熟状態での遠隔地への出荷が困難な果物でした。それを可能にしたのが「イチゴ収穫ロボット」です。
イチゴ収穫ロボットは完熟状態のイチゴを池上通信機のRTC-21カメラで選別し、イチゴの茎をつまんで収穫します。そして収穫したイチゴは人の手に触れないまま専用の容器「フレシェル(Freshell)R」に入れられて輸送されるのです。この間一度も人の手を介さないところに特長があります。
このイチゴ収穫ロボットが栃木県の新しいイチゴの品種として注目されている大型完熟イチゴの収穫で活躍。RTC-21で選別された完熟した大型完熟イチゴは、人の手に一切触れることなく「フレシェル」に個別包装され、これまで産地でしか流通できなかった大型完熟イチゴの遠方への流通を可能としたのです。
この成果として、「フレシェル」に個別包装された完熟の大型完熟イチゴが鮮度を保ったままヨーロッパに空輸され、2年連続で国際味覚審査機構の優秀味覚賞(2015年度は二ツ星、2016年度は三ツ星)を受賞しました。
RTC-21の果たす役割

イチゴ収穫ロボット
イチゴ収穫ロボットにおいて重要な位置を占めるのが完熟したイチゴのみ正確に選別して収穫する目となるカメラの存在です。通常のRGBカメラではイチゴの葉と茎の緑色の違いが判別困難であり、正確な選定ができません。その中で採用されたのが当社の「RTC-21」カメラでした。
RTC-21は幅広い色域が特長のカメラで、広色域・高色忠実XYZ映像をPC上で確認することにより、それぞれの微妙な色の違いが高精度で判別可能となり、イチゴ収穫ロボットの茎抽出処理アルゴリズムの精度向上に貢献しました。また、RTC-21の高色域・高色忠実という性能がイチゴ収穫ロボットのセンサとしてイチゴの葉と茎を見分けることに極めて有効であり、尾崎教授・柏嵜准教授の研究チームのプロジェクトの成果に大きく貢献しました。
現在は宇都宮大学を起点とした研究プラットフォームに参画することにより、受託開発案件として、イチゴの非破壊・非接触の外観および品質検査のためのカメラシステムの開発準備にとりかかっています。このプロジェクトではイチゴの外観の検査はもちろんのこと、非破壊・非接触による美味しさの数値化を実現化するべく宇都宮大学の優れた知見を反映したカメラを開発する予定です。
これからの農業ロボットの可能性と池上への期待
農業人口の減少や高齢化に伴い、作業の省力化、自動化が急務だと言う尾崎教授と柏嵜准教授、イチゴ収穫ロボット開発の目的は、莫大なコストを掛けることなく、「今ある農場に持っていけばすぐに使えるロボットで農業分野に貢献したい」という思いだったそうです。

尾崎教授

柏嵜准教授
まず着目されたのが「色による識別」
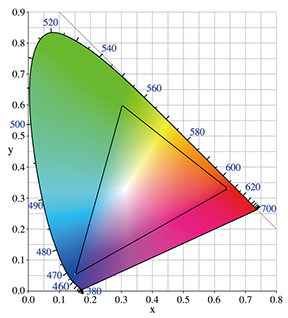
RTC-21の高色域のグラフ(XYZ色度分布)
「イチゴと一言に言っても、その1つ1つで大きさも形もそれぞれです。そのためロボットに形を記憶させるだけでは、どこにイチゴがあるのか認識すらできませんでした。つまり形状判定が不可能というのが大きな課題でした。そこで目をつけたのが色による識別です。色判定であれば形が違ってもどこにイチゴがあるか、ロボットは簡単に見分けることができます。」
研究チームでは、それまで、RGBカメラをセンサとして採用し、取り込んだ映像をXYZの座標に変換していたそうですが、当社のXYZカメラ「RTC-21」をイチゴ収穫ロボットのセンサに採用することで、直接XYZの座標データとして色の識別が可能となり、イチゴと茎の色による識別精度が向上できたそうです。
現状では、実と葉や茎との色が異なるイチゴやトマトの収穫ロボットの開発が中心とのことですが、XYZカメラ「RTC-21」をセンサとして使用することで、特にRGBカメラでは識別困難な緑色の識別が高精度で可能となり、これまで困難と思われたキュウリやピーマンの収穫ロボットも実現可能とのことです。
人間ができないことを可能にするロボットの開発
「皆さんは、人間と同じレベルの動きができるロボットを期待しているようですが、私たちはそんなことは当たり前だと思っています。それ以上の付加価値をいかに付けられるかが課題だと思っています。」
尾崎教授と柏嵜准教授の研究チームでは、色の識別による非接触での「完熟度」の判定に加え、見た目では認識できない「傷」の判定、更には「味(甘さ)」の判定まで可能とするロボットの開発を目指すそうです。
「池上通信機には、是非とも将来の農業ロボットを可能にするセンサカメラ)の開発に期待しています。」
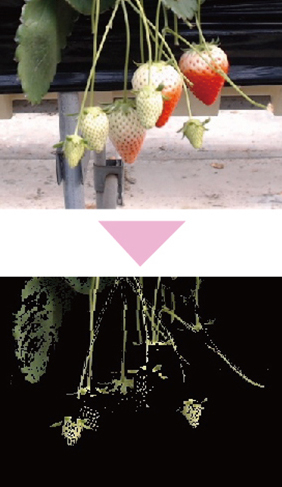
RGBセンサの画像

XYZセンサの画像
RTC-21による茎の緑色の色別
Ikegamiのソリューション提供を支えるハイエンド製品

高色忠実XYZカメラ
ILOREAL RTC-21
RTC-21は、一般的なRGB三原色カメラでは捉えられない幅広い色域の色情報が取得できる、人の眼と等価な感度のXYZ表色系を採用したカメラです。