
Inspection
January 19, 2017
Professor Ozaki's laboratory of Utsunomiya University (Tochigi, Japan)
Ikegami’s Real True Color XYZ Camera “RTC-21” acts as eyes for the Strawberry Harvesting Robot, which was awarded the 7th Robot Award for its contributions in distinguishing mature strawberries with non-contact.
The Strawberry Harvesting Robot that is being developed by the laboratory, which professor Ozaki is in charge of while working at the Faculty of Engineering of Utsunomiya University, employs Ikegami’s Real True Color XYZ Camera “RTC-21” as eyes. It contributes to harvesting mature strawberries by utilizing the features of “RTC-21”, which has an outstanding wide color gamut and highly faithful color, to distinguish the color of a strawberry with high accuracy, adding to the improvement of recognition performance of stem and leaf when harvesting a strawberry.

The Strawberry Harvesting Robot that is being developed by the laboratory, which professor Ozaki is in charge of while working at the Faculty of Engineering of Utsunomiya University, employs Ikegami’s Real True Color XYZ Camera “RTC-21” as eyes. It contributes to harvesting mature strawberries by utilizing the features of “RTC-21”, which has an outstanding wide color gamut and highly faithful color, to distinguish the color of a strawberry with high accuracy, adding to the improvement of recognition performance of stem and leaf when harvesting a strawberry.
Due to the fact that strawberries get damaged easily during distribution, it was considered the fruit that was difficult to deliver to distant areas with mature conditions. The Strawberry Harvesting Robot is the solution for this problem. It harvests a strawberry by picking up the stem after selecting a mature one, with Ikegami’s camera RTC-21. The harvested strawberries are put into the specialized container “Freshell R” without human’s touch, and delivered. Throughout all processes, there is no contact by humans, and that is the merit of it. The Strawberry Harvesting Robot is actively engaged in harvesting the mature strawberries that receive attention as a new variety of Chiba strawberries. The large mature strawberry selected by RTC-21 is packed in the Freshell R container individually without human’s touch. The mature strawberries were distributed only in a producing area, and now it can be also delivered to distant areas. As the outcome, the mature large strawberry individually packed in the Freshell is exported to Europe, maintaining a fresh condition and being awarded Superior Taste Award of the International Taste & Quality Institute two years in a row - Superior Taste Award with two stars in 2015 and Superior Taste Award with three stars in 2016.

Freshell

Comparison of a large mature strawberry's size
The RTC-21’s role for the Strawberry Harvesting Robot

Strawberry Harvesting Robot
For the Strawberry Harvesting Robot, a camera plays the important role of eyes to select only a mature strawberry. Since general RGB cameras can’t distinguish the difference of the green color between a leaf and stem of a strawberry, they can’t accurately choose a mature strawberry. Which is why our camera “RTC-21 has been employed. The RTC-21 camera has an outstanding wide color gamut. It contributes to improving the accuracy of the stem extraction process algorithm of the Strawberry Harvesting Robot. Thanks to RTC-21’s features, now the Strawberry Harvesting Robot can distinguish the subtle difference of colors by checking the XYZ image with wide color gamut and highly faithful color on a PC. The performance of RTC-21’s wide color gamut and highly faithful color, in addition, is very effective to take a role as sensor for the Strawberry Harvesting Robot to distinguish between the leaf and the stem of strawberry. It enabled the research team, lead by professor Ozaki and assistant associate professor Kashiwazaki, to obtain good results. Now, Ikegami takes part in the planning of the research flat form, started from Utsunomiya University. As a consignment development, we are preparing to develop a camera system for checking the appearance and quality of a strawberry using non-destructive and non-contact inspection. The goal of this project, in addition to the inspection of a strawberry’s appearance, is to actualize digitalization of tastiness by non-destructive and non-contact inspection. To support it, a camera is scheduled to be developed applying the rich knowledge of Utsunomiya University.
Potential for agricultural robot and expectations of Ikegami’s future development
Professor Ozaki and assistant associate professor Kashiwazaki have an idea that work minimization and production automation are urgent issues due to the decrease of the agricultural population and increasing aging population. According to what they said, the purpose of developing the Strawberry Harvesting Robot was “to contribute to the agricultural field by providing a robot that can be used promptly in the current farms” without enormous cost.

Professor Ozaki

Assistant associate professor Kashiwazaki
Pays attention to "discrimination by a color"
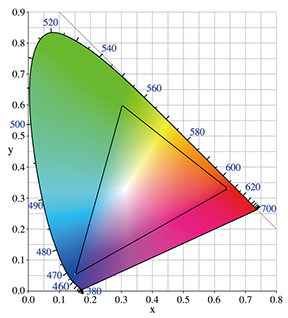
Graph of RTC-21’s wide color gamut
(Chromaticity distribution of XYZ)
“Since each strawberry is different in size and shape, making a robot remember the shape of a strawberry is not enough, even to realize where it is. In other words, it was a big problem that shape judgement is impossible. Discrimination by a color was paid attention to as a solution for this problem. Color judgement makes it possible that a robot can easily recognize where a strawberry is regardless of the shape.” The research team had reportedly converted a captured image into XYZ coordinates using a RGB camera as sensor. As XYZ coordinate data can be directly used to distinguish a color by employing Ikegami’s XYZ camera “RTC-21” as sensor of the Strawberry Harvesting Robot, the discrimination accuracy by colors of a strawberry and stem has been improved. Now, a harvesting robot is being developed that focuses on strawberries and tomatoes, and that the color between the fruits, their leaves and their stems are different. A harvesting robot for a cucumber and green pepper, which is considered difficult to distinguish the color when using a RGB camera that has a problem to distinguish a green color, can be also realized by using the XYZ camera "RTC-21" as sensor.
Development of a robot available to achieve tasks that human cannot
“Everyone seems to expect a robot that can act the same as a human, but we think it is no wonder. We believe that it is a task how to create added value more than it.” The research team that professor Ozaki and assistant associate professor Kashiwazaki lead is aiming to develop a robot that can judge a scratch and tastiness which can’t be noticed by the human eye, adding to the current development of judging “maturity degree” with non-contact by color discrimination. "We expect Ikegami will develop a sensor camera that supports the future agricultural robot"
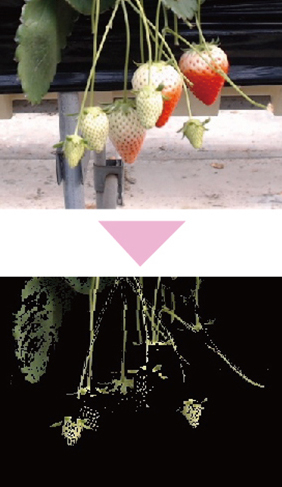
Image of RGB senso

Image of XYZ sensor
Stalk (green) colors, identified by RTC-21
Ikegami's high-end products supporting for providing solution

Real True Color XYZ Camera
ILOREAL RTC-21
The RTC-21 can acquire color information with wide color gamut that a conventional RGB camera can’t capture by employing the XYZ color coordinates having a sensitivity equivalent to human's eye.